 Главная
ГлавнаяПрименяемые для привода горных машин роторные пневмодвигатели имеют большие моменты инерции роторов и работают в условиях мгновенного изменения нагрузок на исполнительный орган или частого его стопорения, что приводит к высоким динамическим нагрузкам в трансмиссии, достигающим 3—6-кратной величины по сравнению с максимальным моментом. Моменты инерции роторов составляют 80—90% всех инерционных масс системы привод — исполнительный орган. Вместе с тем установлено, что величина момента инерции роторов имеет свое оптимальное значение и определяется устойчивой работой машины.
Роторы в стальном исполнении в ряде случаев не могут обеспечить требуемую величину моментов инерции, что снижает надежность машин, приводит к их авариям. Предохранение полимерных роторов от контактного износа в процессе работы обеспечивается находящимися вне корпуса пневмодвигателями стальными синхронизирующими шестернями (см. рис. 14.1).

B связи с этим выбранные стеклопластиковые материалы, описанные выше, удовлетворяют, с одной стороны, требованиям прочности, с другой — уменьшения веса роторов. Последнее дает возможность в широких пределах изменять моменты инерции роторов без изменения их геометрических размеров и позволяет снизить динамические нагрузки в элементах горных машин.
Рассмотрим такую возможность на примере наиболее характерного режима — стопорения, при котором возникают наибольшие динамические нагрузки. При рассмотрении режима стопорения механическую систему представляем одной массой (рис. 14.4), соединенной с исполнительным органом упругим элементом трансмиссии жесткостью ст.
Силы сопротивления на исполнительном органе горных машин являются функциями перемещения, а приращение сопротивления на единицу перемещения служит характеристикой податливости препятствия. Препятствие можно рассматривать как односторонний упругий элемент жесткости с1, присоединенной последовательно к жесткости ст трансмиссии.
При столкновении исполнительного органа с препятствием торможение происходит плавно, так как сказывается податливость препятствия вследствие неабсолютной жесткости закрепления машины. Поэтому приведенная жесткость при стопорении значительно меньше жесткости энергомеханической системы. Величина приведенной жесткости препятствия в реальных условиях не превышает 1 кДж/рад. При этом несущественно, имеет ли препятствие упругий характер податливости или податливость связана с его разрушением.
Анализ показывает, что максимальное значение приведенной жесткости, равное 1 кДж/рад, относится к механическим системам с большой энергоемкостью, номинальные моменты приводных двигателей которых находятся в пределах 1—1,2 кДж. Это дает основание распространить соизмеримость приведенной максимальной жесткости и номинального момента на системы с приводными двигателями малой мощности.
Уравнение движения машинного агрегата для такого случая имеет вид

В левой части уравнения (14.1) стоит суммарный действующий момент, состоящий из момента, развиваемого самим двигателем, и динамического момента, направленного при торможении в сторону движения. Правая часть уравнения (14.1) представляет суммарный момент сопротивления, равный некоторому реактивному моменту, которым был нагружен двигатель, например, в момент столкновения исполнительного органа с твердым включением, плюс приращение момента сопротивления, которое при принятой линейной зависимости между сопротивлением исполнительному органу и перемещением его заклинившего сечения будет пропорционально углу поворота ротора.
Перепишем уравнение (14.1) в виде

где в = (Мпуск—Мном)/wн; Mпуск и Mном — пусковой и номинальный моменты двигателя соответственно; (о„ — номинальная угловая скорость двигателя.
Решение уравнения (14.2) позволяет получить выражения для динамического момента (Мдин) и времени стопорения (tстоп) при условии корней как в виде комплексных чисел, так и вещественных. Если корни соответствующего выражению (14.2) характеристического уравнения — числа комплексные, то

ст и с — жесткость трансмиссии и приведенная жесткость системы соответственно.
Если корни соответствующего выражению (14.2) характеристического уравнения — числа вещественные, то

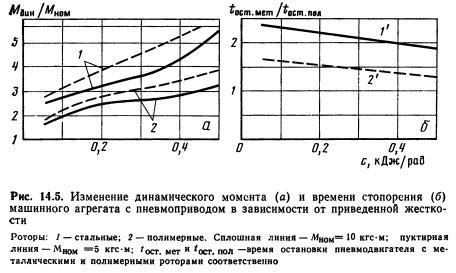
Анализ выражений (14.3)-(14.6) показывает, что моменты инерции роторов в режиме стопорения являются основным параметром, определяющим динамическую нагруженность машинного агрегата. Так, уменьшение в 3 раза инерционности пневмодвигателей типов ПРД-2 и ПРД-3 мощностью N1 = 8 кВт и N2 = 15 кВт соответственно в интервале приведенных жесткостей с = 5-200 Дж/рад за счет изготовления роторов из полимерных композиций приводит к возможности снижения динамических нагрузок и времени стопорения двигателей, т. е. времени приложения повышенных нагрузок в 1,5-1,8 раза (рис. 14.5).
Уменьшение моментов инерции роторов снижает также динамические нагрузки на подшипниковые узлы двигателя, что делает его более надежным в работе. Сравнительные испытания пневмодвигателей со стальными и пластмассовыми роторами, проведенные на буровом станке HKP-100М, показали, что снижение моментов инерции роторов повышает работоспособность агрегата в 2 раза.
Для оценки эффективности роторных пневмодвигателей с пластмассовыми роторами проведены их продолжительные промышленные испытания на буровых станках НКР-100М и породопогрузочных машинах угольных шахт. На указанных агрегатах реализуется сложный динамический режим нагружения, обусловленный частым стопорением исполнительного органа и меняющийся в процессе бурения жесткости системы.
Наилучшую работоспособность в условиях эксплуатации показали пневмодвигатели, ведущий ротор которых выполнен из прессованных стеклотканевых материалов АСТТ(б)-С2, а ведомый — из более простого прессматериала АГ-4С.
Отметим для сравнения, что с обычно применяемым пневмодвигателем К-0.8Ф буровой агрегат нуждается в ремонте после бурения 600—800 пог. м скважин, а с пневмодвигателем типа ПРД, оснащенным роторами из полимерных композиций, — после 1400—1600 пог. м.