 Главная
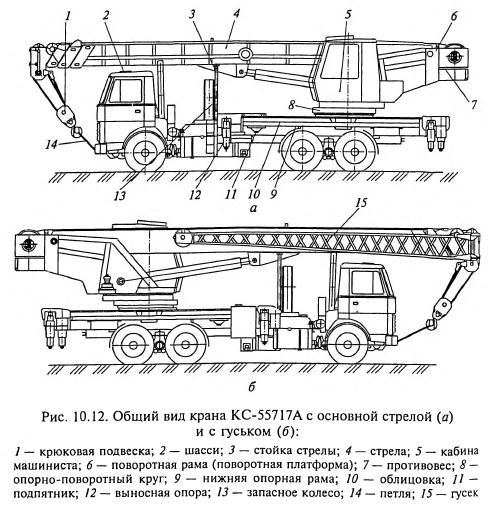
ГлавнаяАвтомобильные краны КС-55717, -55717А грузоподъемностью 32 т смонтированы на шасси соответственно КамАЗ-53229 и МАЗ-63038 (рис. 10.12). На этих кранах установлена четырехсекционная телескопическая стрела длиной 9,4...27,4 м. В качестве сменного вспомогательного стрелового оборудования предусмотрен гусек длиной 7 м. Грузовысотные характеристики кранов представлены на рис. 10.13.
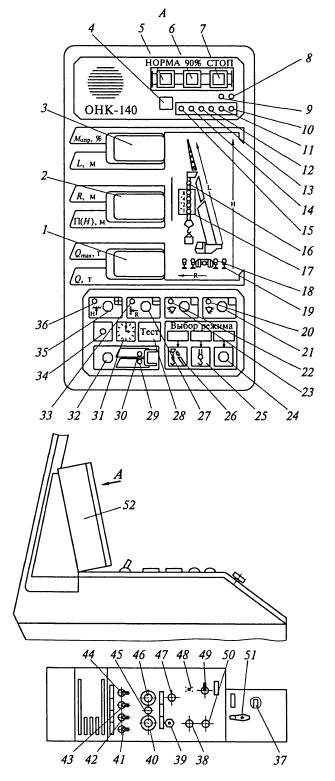
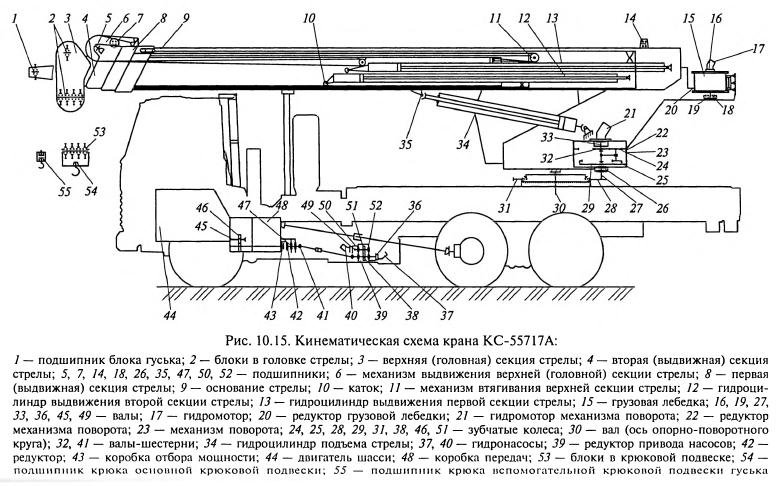
Привод двух гидронасосов осуществляется от коробки отбора Мощности, установленной на коробке передач шасси MA3-63038. Крутящий момент от коробки отбора мощности передается к двум насосам через карданный вал и редуктор привода насосов, нагнетающих рабочую жидкость в гидравлическую систему крана. Управление приводом насосов (включением-выключением) коробки отбора мощности) осуществляется электропневматическим приводом. Для управления кранами из кабины машиниста используются приводы управления двигателем шасси и рабочими (исполнительными) механизмами, а также электропневматический привод включения гидронасосов. Контроль за работой двигателя шасси предусмотрен при включении электропитания кранового оборудования кнопочным выключателем в кабине шасси (в кабине водителя) и выключателем 41 (рис. 10.14) в кабине машиниста, а также с помощью кнопки 26 по индикатору блока обработки данных на щитке приборов. Для останова двигателя из кабины машиниста применен электропневматический привод. На кранах возможна как раздельная, так и совмещенная работа механизмов, для чего в кинематической схеме предусмотрен раздельный гидравлический привод (рис. 10.15).

Органы управления и контрольно-измерительные приборы по аналогии с другими автомобильными кранами расположены в кабинах шасси и машиниста на поворотной раме и на задней поперечной балке нижней опорной рамы.
Схема управления крановыми операциями из кабины машиниста приведена на рис. 10.16; видно, что в кабине машиниста сосредоточены рукоятки управления механизмами подъема, поворота, изменения вылета и выдвижения секций стрелы. Указанные рукоятки соединены тягами с соответствующими золотниками верхних гидрораспределителей на поворотной раме. На щитке приборов 2 установлены блок обработки данных 52 (см. рис. 10.14) ограничителя нагрузки крана, контрольно-измерительные приборы и органы управления 1—51 приборами освещения, отопительной установкой, вентилятором. Переключатели, кнопки и индикаторы имеют соответствующие таблички.
При подготовке к работе кран устанавливается на четыре выдвижные выносные опоры, каждая из которых имеет полностью выдвинутое (рабочее) и втянутое (транспортное) положение. В транспортном положении стрела крана опирается на стойку поддержки, что исключает поперечные смещения стрелы во время движения машины.

Опорно-поворотный круг (ОПУ) выполнен шариковым однорядным с наружным зацеплением, наружным диаметром 1460 мм. Для смазывания шариков и дорожек качения имеются четыре масленки. Непосредственно поворотная часть крана состоит из поворотной рамы (рис. 10.17), на которой смонтированы кабина машиниста (крановщика), противовес, рабочие (исполнительные) механизмы, оборудование системы обогрева кабины машиниста. Снизу к основанию поворотной рамы приварено опорное кольцо 1 для крепления опорно-поворотного круга. Механизм поворота (механизм вращения поворотной рамы) конструктивно представляет собой гидромотор и редуктор с встроенным дисковым тормозом. Редуктор механизма поворота — двухступенчатый планетарный, его дисковый тормоз размыкается гидравлическим поршнем при подаче давления рабочей жидкости в штуцер. Выходной вал с выходной шестерней расположен в нижней части механизма поворота.

Механизм подъема представляет собой грузовую планетарную лебедку марки ЛГ-55-1, состоящую из редуктора, барабана, гидромотора и прижимного ролика. Схемы запасовки грузового каната механизма подъема и крепление каната в барабане грузовой лебедки приведены на рис. 10.18, 10.19. Функции механизма изменения вылета выполняет гидроцилиндр подъема штока, при выталкивании которого происходит увеличение угла наклона (подъема) стрелы, а при втягивании — уменьшение угла наклона (опускание) стрелы. Управление гидроцилиндром подъема стрелы производится рукояткой управления в кабине машиниста.

Механизм выдвижения секций стрелы размещен внутри самой стрелы и состоит из двух гидроцилиндров 10 и 14 (рис. 10.20) и двух канатных полиспастов. Выдвижная секция 2 перемещается в секции 1 длинноходовым гидроцилиндром 14, шток которого закреплен осью в корневой части секции 1. При этом гильза гидроцилиндра 14 закреплена в секции 2 пальцами. Выдвижная секция 4 перемещается в секции 3 с помощью двух канатных полиспастов, когда совершает движение секция 3. Полиспаст выдвижения секции 4 состоит из каната 5, блоков на секции 3, сегмента 22 на секции 4 и механизма натяжения. В свою очередь полиспаст втягивания секции 4 образуется канатом 13 на секции 4, блоками на секции 3, уравновешивающимся блоком и натяжным устройством. При этом натяжение каната 13 осуществляется гайками натяжного устройства, а натяжение каната 5 — гайками 8. Секции стрелы выдвигаются в следующей последовательности. Сначала перемещается вторая секция, а затем синхронно выдвигаются третья и четвертая секции. Последовательность втягивания секций следующая: сдвигаются синхронно четвертая и третья секции, втягивается вторая секция. От бокового смещения секции удерживаются опорами скольжения 19 и 20. Регулирование зазора между опорами скольжения и поверхностями, по которым они скользят, осуществляется регулировочными прокладками, устанавливаемыми под опоры скольжения. Доступ к пресс-масленкам верхних смазочных устройств обеспечивается при втянутых секциях через отверстия, закрытые пробками.

Схемы запасовки каната механизмов выдвижения и втягивания четвертой секции стрелы приведены на рис. 10.21.
Основная крюковая подвеска предназначена для работы в качестве грузозахватного органа кранов КС-55717 и -55717А при восьмикратной, шестикратной и четырехкратной запасовках грузового каната. С учетом добавления в полиспасте четвертого блока конструкция крюковой подвески подобна аналогичному грузовому органу автомобильных кранов КС-35714, -35715. Вспомогательная крюковая подвеска для работы с гуськом при однократной запасовке грузового каната не отличается от такой же крюковой подвески кранов КС-3574, -3577-4, -35714, -35715.

Работа электрооборудования связана с включением или выключением соответствующих приборов в кабинах шасси и машиниста на поворотной раме. В электрической принципиальной схеме предусмотрен специальный электромагнит, который включает ускоренные подъем или опускание груза механизмом подъема. При работе крана с недопустимыми грузами происходит размыкание вмонтированных для этого в электрическую цепь контактов реле, благодаря чему обесточиваются промежуточные реле и соответственно электромагниты, — механизмы крана останавливаются, причем электрическая схема разрешает выполнять только операцию опускания груза. В составе электрооборудования имеется токосъемник, который по назначению, месту расположения, исполнению конструкции и принципу действия одинаков с токосъемником кольцевого типа автомобильных кранов КС-35714 и -35715.
К приборам и устройствам безопасности кранов КС-55717 и -55717А относятся ограничители грузоподъемности, высоты подъема, наклона стрелы, глубины опускания груза, усилия затяжки крюковой подвески, указатель угла наклона крана относительно горизонта во время работы, звуковой сигнал, цифровые индикаторы, гидроклапаны. Ограничитель грузоподъемности предназначен для автоматического отключения механизмов крана при работе с грузами, превышающими допустимые на установленных длине стрелы и вылете, а также при превышении установленных параметров по высоте, вылету и углу поворота крана при работе в стесненных условиях или вблизи линий электропередачи.
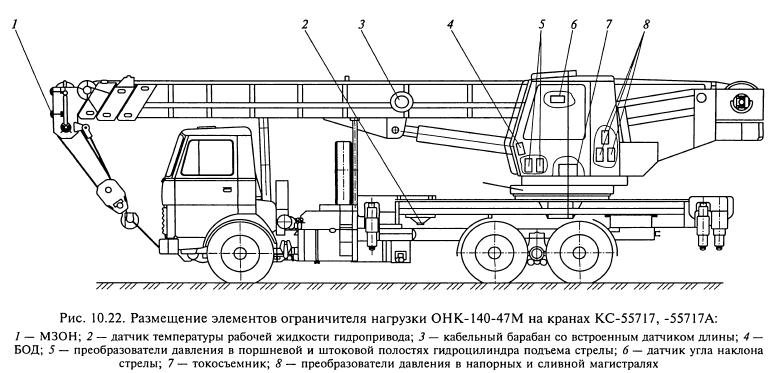
На кранах КС-55717 и -55717А в качестве ограничителя грузоподъемности установлен ограничитель нагрузки крана OHK-140-47М (рис. 10.22). В его состав входят БОД 4; датчик длины стрелы, встроенный в кабельный барабан 3; датчик 6 угла наклона стрелы; преобразователи давления, установленные в гидролиниях поршневой и штоковой полостях гидроцилиндра подъема стрелы; преобразователи давления 8, установленные в напорных и сливных контурах; датчик 2 температуры рабочей жидкости гидропривода крана, установленный на гидробаке; датчик угла поворота платформы (датчик азимута); МЗОН 1.
Блок обработки данных осуществляет преобразование сигналов датчиков в цифровой код; выполнение необходимых математических расчетов; формирование выходных сигналов управления исполнительными реле, включенными в электрическую схему крана; выдачу информации на цифровые и световые индикаторы.
Датчики предназначены для преобразования соответствующих параметров в электрические сигналы, направляемые в БОД ограничителя. Датчик длины стрелы установлен в кабельном барабане 3 и состоит из многооборотного потенциометра, ось которого при помощи редуктора соединена с барабаном. При перемещении секций стрелы и вращении барабана вращение получает и ось потенциометра. Соединение датчика с БОД осуществляется при помощи штепсельного разъема и проводов.
Датчик угла поворота платформы установлен под кожухом кольцевого токосъемника. Датчик состоит из безупорного потенциометра, ось которого через шестерни привода соединена со стойкой токосъемника. Датчик соединен с БОД при помощи штепсельного разъема и проводов.
Датчик 6 угла наклона стрелы является универсальным модулем, который установлен на основании стрелы и соединен с БОД при помощи штепсельного разъема и проводов. В ограничителе грузоподъемности установлен блок телеметрической памяти, обеспечивающий запись и долговременное хранение информации о рабочих параметрах крана и степени нагрузки крана в течение всего срока службы ограничителя.
Подробное описание ограничителя нагрузки крана приведено в паспорте, руководстве по эксплуатации и инструкции по монтажу, пуску и регулированию на ограничитель нагрузки крана ОНК-140-47М, входящих в комплект эксплуатационной документации крана.

Ограничители высоты подъема (рис. 10.23, а, б) и глубины опускания предназначены для автоматического отключения механизма подъема при достижении крюковой подвеской предельного верхнего и нижнего положений. Ограничитель наклона стрелы (рис. 10.23, в) предназначен для отключения механизма изменения вылета при достижении стрелой крайнего верхнего положения, во избежание срабатывания ограничителя грузоподъемности. Ограничитель высоты подъема должен срабатывать при расстоянии между крюковой подвеской и оголовком стрелы не менее 200 мм, а ограничитель глубины опускания должен срабатывать, когда на грузовом барабане остается не менее 2—3 витков каната. Ограничитель наклона стрелы должен срабатывать на вылете крюка 2,6 м при длине стрелы 9,4 м.
На кранах в качестве указателей угла наклона применяются креномеры жидкостного типа (см. рис. 8.26). Один из них установлен на задней поперечной балке нижней опорной рамы и используется при установке крана на выносные опоры, другой установлен в кабине машиниста на поворотной раме и предназначен для наблюдения за возможным изменением угла наклона крана во время работы.
Гидравлическая схема кранов КС-55717 и -55717А (рис. 10.24) позволяет выполнять подъем (опускание) груза, подъем (опускание) стрелы, выдвижение (втягивание) секций стрелы, выдвижение (втягивание) выносных опор, подъем (опускание) штоков гидроцилиндров вывешивания крана.
Гидравлическая схема кранов позволяет совмещать следующие рабочие операции: подъем груза с вращением поворотной платформы; опускание груза с вращением поворотной платформы; подъем груза с выдвижением секций стрелы; подъем груза с втягиванием секций стрелы; опускание груза с выдвижением секций стрелы; опускание груза с втягиванием секций стрелы; подъем стрелы с вращением поворотной платформы; опускание стрелы с вращением поворотной платформы; подъем стрелы с выдвижением секций стелы; подъем стрелы с втягиванием секций стрелы; опускание стрелы с выдвижением секций стрелы; опускание стрелы с втягиванием секций стрелы.
В зависимости от положения рукоятки управления двухпозиционного крана KP гидравлическая схема обеспечивает работу гидродвигателей механизма выносных опор или гидродвигателей механизмов Р6 и Р7, установленных на поворотной части. От гидрораспределителя Р5 поток рабочей жидкости направляется к гидроцилиндрам Ц1 — Ц8, расположенным на опорной раме, а от гидрораспределителей Р6, Р7 — к гидромоторам M1, М2 и к гидроцилиндрам Ц10, ЦП, Ц13, расположенным на поворотной раме. Давление рабочей жидкости в системе гидроцилиндров Ц1—Ц8 ограничивается предохранительным клапаном КП1, встроенным в напорную секцию гидрораспределителя Р5.

Ограничение давления рабочей жидкости в контуре гидроприводов исполнительных механизмов осуществляется предохранительными клапанами КП4, КП5. Контроль давления в гидравлической системе осуществляется в кабине машиниста по цифровому индикатору 2. Для предохранения гидропривода механизма подъема от динамических перегрузок в линии гидромотора на опускание груза установлен блок уравновешивания БУ (см. рис. 10.24) с предохранительным клапаном. Пиковые давления, возникающие при резком изменении скорости поворота и остановке поворотной платформы, гасятся предохранительным клапаном гидроклапанного блока БК1. Ручной насос KP предназначен для приведения выносных опор в транспортное положение при аварийной ситуации. Контроль засоренности масляного фильтра осуществляется по загоранию сигнальной лампы в кабине шасси или по показаниям манометра при операциях опускания стрелы и втягивания секций стрелы.
При установке крана на выносные опоры двухпозиционный кран KP должен находиться в левом по схеме положении (в соответствии с изображением на схеме). Рабочая жидкость от насоса HA1 через двухпозиционный кран KP поступает в напорную магистраль гидрораспределителя Р5. При нейтральном положении золотников гидрораспределителя (положение, изображенное на рис. 10.24) полости гидроцилиндров Ц1— Ц8 заперты, напорная магистраль соединена со сливом. Рабочая жидкость от насоса HA1 под давлением, зависящим от сопротивления гидрораспределителя и трубопроводов, направляется в гидробак Б.

Для выдвижения выносных опор третий справа золотник гидрораспределителя Р5 должен быть установлен в нижнее по схеме положение. При этом рабочая жидкость от насоса через гидрораспределитель поступает в поршневые полости гидроцилиндров Ц5—Ц8, а рабочая жидкость из штоковых полостей поступает в сливную магистраль гидрораспределителя и далее через масляный фильтр в гидробак Б — происходит выдвижение выносных опор. Втягивание выносных опор производится этим же золотником, который устанавливается в верхнее по схеме положение. При этом рабочая жидкость поступает от насоса через гидрораспределитель в штоковые полости гидроцилиндров Ц5—Ц8. Для выдвижения штоков гидроопор соответствующий золотник рабочей секции гидрораспределителя Р5 устанавливается в нижнее по схеме положение. При этом рабочая жидкость от насоса HA1 через двухпозиционный кран KP и обратные клапаны гидрозамков ЗМ1—ЗМ4 поступают в поршневую полость соответствующей гидроопоры. Для подъема штоков гидроопор соответствующие золотники рабочих секций гидрораспределителя переводятся в верхнее по схеме положение, при этом рабочая жидкость поступает в штоковую полость соответствующей гидроопоры. Так как выход из поршневых полостей закрыт гидрозамками, давление в штоковых полостях возрастает, гидрозамки открываются и рабочая жидкость из поршневых полостей сливается в гидробак Б. Гидрозамки ЗМ1—ЗМ4 предотвращают самопроизвольное втягивание штоков гидроопор в случаях обрыва трубопроводов или утечки рабочей жидкости через гидрораспределитель. При выходе из строя насосов или двигателя шасси для снятия крана с выносных опор всасывающая магистраль ручного насоса HP соединяется с гидробаком рукавом ГТ25.
Втягивание штоков гидроопор вывешивания крана, гидроцилиндров выносных опор производятся ручным насосом при переведенном двухпозиционном кране KP в нижнее по схеме положение и включении соответствующего золотника гидрораспределителя Р5 в верхнее по схеме положение.
При подъеме (опускании) стрелы рабочая жидкость от гидронасоса НА2 поступает в напорную магистраль гидрораспределителя Р7 через вращающееся соединение А. Подъем стрелы осуществляется переводом в верхнее по схеме положение золотника соответствующей секции гидрораспределителя Р7. Рабочая жидкость через тормозной клапан KT поступает в поршневую полость гидроцилиндра Ц13. Для опускания стрелы тот же золотник переводится в нижнее по схеме положение, рабочая жидкость поступает в штоковую полость гидроцилиндра и в линию управления клапана КТ. При этом клапан открывается, пропуская рабочую жидкость из поршневой полости на слив. Клапан KT выполняет функцию гидрозамка, предотвращая втягивание штока из-за утечек при обрыве трубопровода, и обеспечивает стабильность скоростного режима опускания стрелы.
При вращении поворотной рамы (поворотной платформы) двухпозиционный кран KP должен находиться в нижнем по схеме положении. Рабочая жидкость от насоса HA1 через двухпозиционный кран KP поступает в напорную магистраль гидрораспределителя Р6 через вращающееся соединение А.
Управление гидромотором механизма поворота выполняется золотником соответствующей секции гидрораспределителя Р6, который устанавливается в зависимости от направления поворота в верхнее или нижнее по схеме положение. При этом рабочая жидкость поступает к гидромотору M1 и размыкателю тормоза Ц9.
Тормоз размыкается, гидромотор начинает вращаться, а отработанная рабочая жидкость через гидрораспределитель и вращающееся соединение сливается в гидробак Б.
Клапанный блок БK1 предназначен для защиты механизма поворота от перегрузок, что обеспечивается перепусканием части потока рабочей жидкости из напорной линии в сливную при превышении давления рабочей жидкости в напорной линии выше допустимого, а также для подачи рабочей жидкости от напорной линии гидромотора к гидроразмыкателю тормоза механизма поворота через обратные клапаны.
Когда происходит подъем (опускание) груза двухпозиционный кран KP находится в правом по схеме положении. Рабочая жидкость от насоса НА2 поступает в напорную магистраль гидрораспределителя Р7 через вращающееся соединение А. Для подъема груза золотник соответствующей секции гидрораспределителя Р7 переводится в верхнее по схеме положение. При этом рабочая жидкость поступает к гидромотору М2 через обратный клапан гидроблока уравновешивания БУ и к размыкателю тормоза Ц12. Тормоз размыкается, вал гидромотора начинает вращаться, а отработанная рабочая жидкость сливается в гидробак Б. При опускании груза тот же золотник переводится в нижнее по схеме положение, и рабочая жидкость поступает в противоположную полость гидромотора, в линию управления уравновешивающего клапана гидроблока уравновешивания БУ и к размыкателю тормоза Ц12. Уравновешивающий клапан открывается, пропуская рабочую жидкость на слив, и обеспечивает при этом стабильность скоростного режима опускания груза. Для получения ускоренного перемещения крюка необходимо с включением золотника гидрораспределителя Р7 на выполнение операции включить электроуправление гидрораспределителя PlO в контуре механизма подъема, что соответствует верхнему по схеме положению. При этом рабочая жидкость через гидрораспределитель PlO поступает к отверстию в крышке регулятора гидромотора. Через систему управления плунжер — рычаг—золотник—поршень блок цилиндров гидромотора устанавливается на минимальный угол наклона, уменьшая тем самым рабочий объем, т.е. увеличивая частоту вращения вала гидромотора. При выключении электроуправления гидрораспределителя P10 (нижнее по схеме положение) блок цилиндров гидромотора устанавливается на прежний максимальный угол наклона. Вентиль ВН3 предназначен для соединения напорной и сливной магистралей гидромотора при проверке тормозов механизма подъема, а также для обеспечения опускания груза при выходе из строя привода механизма подъема или двигателя шасси.
Для выдвижения секций стрелы соответствующий золотник гидрораспределителя Р6 переводится во вторую рабочую позицию, и рабочая жидкость от гидронасоса НА2 через обратный управляемый клапан КОУ1 нагнетается в поршневую полость гидроцилиндра Ц10 и через блок гидроклапанов БК2, шланговый барабан БШ и обратный управляемый клапан КОУ2 в поршневую полость гидроцилиндра 11,11. Слив из штоковых полостей гидроцилиндров направляется в гидробак Б. Происходит выдвижение штоков гидроцилиндров Ц10 и Ц11, причем блок гидроклапанов БК2 обеспечивает последовательное выдвижение штоков гидроцилиндров, т.е. шток гидроцилиндра ЦП начинает выдвигаться только после полного выдвижения штока гидроцилиндра Ц10. Втягивание секций осуществляется переводом золотника в первую рабочую позицию. Рабочая жидкость при этом нагнетается в штоковые полости гидроцилиндров Ц10 и ЦП и одновременно в полость управления обратного управляемого клапана КОУ2, что обеспечивает возможность вытеснения рабочей жидкости из поршневой полости гидроцилиндра Ц11, при этом втягивается четвертая и третья секции стрелы. После полного втягивания штока гидроцилиндра ЦП происходит нажатие на выключатель блокировки последовательности втягивания третьей и четвертой секций стрелы, установленный снизу оголовка стрелы, который включает гидрораспределитель Р8 в первую позицию. Рабочая жидкость нагнетается в полость управления обратного управляемого клапана КОУ1, что обеспечивает возможность вытекания рабочей жидкости из поршневой полости гидроцилиндра Ц10. Втягивание гидроцилиндра Ц10 (второй секции стрелы) возможно только после полного втягивания третьей и четвертой секций стрелы. В случае отказа выключателя блокировки последовательности втягивания третьей и четвертой секций стрелы втягивание гидроцилиндра Ц11 осуществляется при нажатой кнопке блокировки ограничителей на щитке приборов в кабине машиниста (крановщика). Шланговый барабан с намотанным на нем рукавом высокого давления ГТ11 служит для индивидуального подсоединения поршневой полости гидроцилиндра Ц11 к гидрораспределителю Р6, что обеспечивает возможность раздельного управления гидроцилиндрами Ц10 и Ц11 при втягивании секций стрелы.
Стабильность заданного скоростного режима втягивания гидроцилиндров обеспечивается обратными управляемыми клапанами КОУ1 и КОУ2, которые предотвращают самопроизвольное втягивание штоков гидроцилиндров под действием сил тяжести секций стрелы и груза при нейтральном положении соответствующего золотника гидрораспределителя Р6 и в случае повреждения трубопроводов.
При срабатывании приборов безопасности обесточиваются электромагниты гидрораспределителей Р8, Р9. Во время выполнения какой-либо операции немедленно прекращается подача напряжения питания на соответствующий электромагнит и золотник гидрораспределителя с электрическим управлением. Проход рабочей жидкости от гидронасоса HA1 или НА2 (в зависимости от совершаемой операции) на слив в гидробак Б и дальнейшее выполнение данной операции становится невозможным.
Действие ограничителя затяжки крюковой подвески происходит во время приведения крана в транспортное положение. Необходимо установить переключатель 49 (см. рис. 10.14) в положение затяжки крюка.
В этом случае напряжение подается на гидрораспределитель Р9 (см. рис. 10.24), и из линии управления предохранительного клапана КП5 подается давление на предохранительный клапан КП2 (давление (2+0,5) МПа), что обеспечивает необходимое для затяжки крюковой подвески давление рабочей жидкости в гидроконтуре механизма подъема.
Гидрооборудование, образующее гидравлическую схему кранов КС-55717 и -55717А, по своему исполнению и принципу действия аналогично соответствующим элементам гидрооборудования автомобильных кранов КС-35714, -35715.
Освоено производство автомобильного крана грузоподъемностью 36 т модели КС-55721 на шасси КамАЗ-6540. На базе кранов КС-55716 и -5576 созданы и серийно выпускаются автомобильные краны КС-5576А и -5576Б грузоподъемностью 32 т на шасси «Урал-4320» и MA3-630303 соответственно.